池田 徹志 (Tetsushi IKEDA)
トップページ 経歴 研究内容 研究業績人と車の協調運転の研究・自動運転時の安心感の研究
-
研究開発が進められている自動運転では,ドライバーは運転操作から切り離され,周囲の状況も理解しづらくなります.その結果,車の挙動が分からないために不安になる問題や,自動運転レベル3では緊急時のドライバーの対応に問題が生じます.自動運転時のドライバーの不安の定量化や,ドライバーが運転に関わる自動運転の研究を進めています.
力覚フィードバックのある操舵の協調運転
| ドライバーが運転に関わりながらも,運転システムが安全な運転を常に支援する協調運転が,自動運転の目指す1つの方向と考え,研究を進めています.ハンドルの操舵をドライバとシステムが協調して行う方式を提案し, システムの支援により運転が正確になるだけでなく,ドライバたちが自分で運転している感覚である動作主体感が向上する傾向を確認しました. |
 |
Hiroaki Kuramochi, Akira Utsumi, Tetsushi Ikeda, Yumiko O. Kato, Isamu Nagasawa, Kazuhiko Takahashi, Human-Machine Cooperation on Driving Comfort in Highly Automated Steering Maneuvers, Proc. AutomotiveUI, pp. 151-155, 2019. doi:10.1145/3349263.3351498
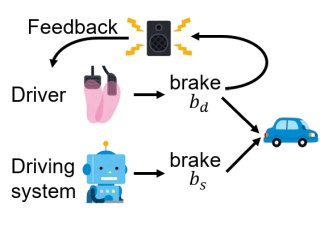
減速および停止操作時の協調運転
| 従来の自動運転とは異なるドライバーと運転システムの関係を提案しています.加減速のペダル操作をタスクとして,ドライバとシステムが協調して車速を制御する方式を提案しました.提案する協調運転方式では,システムの支援強度が比較的小さい場合に,ドライバが自分で運転している感覚である動作主体感が高く維持されることが示唆されました. |
 |
自動運転ドライバへの情報提示によるストレス低減
| 自動運転時にドライバーは周囲の状況を理解しようとする意欲が低下するため,車両の挙動が予想できず不安になる場合があります.車両の将来の挙動をドライバーに伝える事により,安心感が向上することを確認しました.また車いすロボットを用いて,周囲の環境に合わせて利用者の不安を低減する速度調整を行う走行を実現しました. |
|
Taishi Sawabe, Shohei Ota, Masayuki Kanbara1, Norimichi Ukita, Tetsushi Ikeda, Luis Yoichi Morales Saiki, Atsushi Watanabe, and Norihiro Hagita, "Warning Notification of Potential Collisions for Passenger Anxiety Reduction on Autonomous Wheelchairs," The 16th ITS Asia-Pacific Forum FUKUOKA 2018
Taishi Sawabe, Masayuki Kanbara, Norimichi Ukita, Tetsushi Ikeda, Yoichi Morales, Atsushi Watanabe, Norihiro Hagita, "Comfortable Autonomous Navigation Based on Collision Prediction in Blind Occluded Regions," Proc. IEEE Int. Conf. on Vehicular Electronics and Safety (ICVES), pp. 87-92, 2015.
Ryohei Hashimoto, Ryota Nomura, Masayuki Kanbara, Norimichi Ukita, Tetsushi Ikeda, Yoichi Morales, Atsushi Watanabe, Kazuhiko Shinozawa, Norihiro Hagita, "Behavior Representation of Robotic Wheelchairs with Physiological Indices for Passenger Comfort, " Proc. IEEE Int. Conf. on Vehicular Electronics and Safety (ICVES), pp. 176-181, 2015.
自動運転の利用者のストレス計測
| 自動運転レベル3までの自動運転では,ドライバーは運転を注意して見守り,危険な時には責任を持って手動運転を行う必要があります.そのような「運転」は実は快適ではなく,ドライバーに逆にストレスを与える可能性があります.運転シミュレータを用いて,自動運転時のドライバーの振る舞いを計測し,ストレスを感じる条件をモデル化します.また,対策を行った自動運転を体験した時の快適さを検証します. |
 |