池田 徹志 (Tetsushi IKEDA)
トップページ 経歴 研究内容 研究業績周囲の歩行者たちを快適にする振る舞いをする移動ロボット
-
日常生活環境で様々な仕事をする移動ロボットの社会への導入が進められています.人の行き交う中を移動するロボットには,衝突を避けて移動する機能だけでなく,周囲の人が快適に感じる振る舞いが求められます.移動時に周囲に合図や情報提示を行う移動ロボットや,周囲の歩行者の感情を理解して振る舞うロボットの研究を進めています.
顔向きを用いて周囲の人に行き先を伝えるロボット
| 人同士が廊下で滑らかにすれ違う時には,顔向きや視線や体のちょっとした動きなどを用いて,相手に様々な合図を送っています.頭部を持つ移動ロボットが,人とすれ違う時に頭部を動かして相手に気付いたことを伝えたり,移動方向を伝えたりするロボットを評価しました. |
 |
山下 翔平, 池田 徹志, 篠澤一彦, 岩城 敏, 移動ロボットとすれ違う歩行者の印象-主観評価と移動軌跡の関係-, 第21回計測自動制御学会システムインテグレーション部門講演会, 2D1-09, 2020.
Shohei Yamashita, Tetsushi Ikeda, Kazuhiko Shinozawa, Satoshi Iwaki, Evaluation of Robots that Signals a Pedestrian Using Face Orientation Based on Moving Trajectory Analysis, Proc. IEEE Int. Conf. on Robot & Human Interactive Communication (RO-MAN), pp. 1163-1170, 2019. [LINK]
ロボットとすれ違う人の印象の推定
| 歩行者が相手とすれ違って移動する時には,周囲の人の邪魔になっていないかを確かめながら,自分の振る舞いを調整しています.相手の歩きやすさなどの主観的な印象を推定し,行動に反映する移動ロボットの構築を目指しています. |
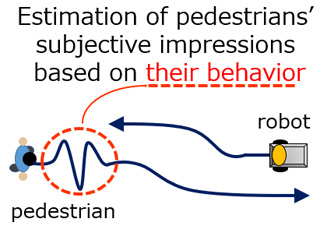 |
梶浦順太, 池田 徹志, 篠沢一彦, 歩行者の主観的な印象を推定してすれ違う移動ロボット, ロボティクス・メカトロニクス講演会, 2023.