Tetsushi IKEDA
top page profile research projects publicationsAutonomous wheelchair robots
-
Automatic driving technology for electric wheelchairs can prevent accidents such as collisions with people and falls, and safely extend the user's range of activities. However, wheelchairs navigate more complex paths than cars, avoiding pedestrians and obstacles in an environment where lanes are not prepared. This results in problems that the user may not understand the wheelchair's behavior, which can cause anxiety, and problems that are difficult for people around the wheelchair to predict.
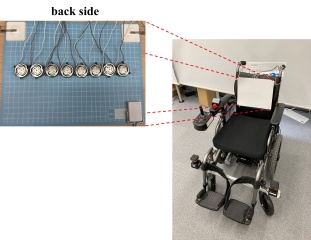
Path presentation to a passenger of autonomous wheelchairs using vibration stimulation
| To alleviate user anxiety about the automatic wheelchair robots, future travel routes are presented to the user through vibration stimuli placed on the seat. We proposed a method in which the wheelchair tells the user a few seconds in advance which side and to what extent the wheelchair will move to avoid pedestrians and obstacles. The proposed method allows the user to understand the wheelchair's movements in advance, thus increasing the user's sense of security and predictability. |
 |
Autonomous personal mobility that shares motion intentions with passengers and pedestrians
| We proposed a method of projecting the future path of an autonomous wheelchair on the ground by installing a projector on the wheelchair. The moment a route is updated, the projected planned route changes shape and communicates the route to the wheelchair user and surrounding pedestrians. |
 |
Yoichi Morales, Atsushi Watanabe, Florent Ferreri, Jani Even, Tetsushi Ikeda, Kazuhiko Shinozawa, Takahiro Miyashita, Norihiro Hagita, "Including Human Factors for Planning Comfortable Paths," Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 6153 - 6159, 2015. [LINK]
Yoichi Morales, Jani Even, Nagasrikanth Kallakuri, Tetsushi Ikeda, Kazuhiko Shinozawa, Tadahisa Kondo, Norihiro Hagita, "Visibility Analysis for Passenger Vehicle Comfortable Navigation," Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2197-2202, 2014.[LINK]
Atsunori Kanemura, Yoichi Morales, Motoaki Kawanabe, Hiroshi Morioka, Nagasrikanth Kallakuri, Tetsushi Ikeda, Takahiro Miyashita, Norihiro Hagita, and Shin Ishii, "A Waypoint-based Framework in Brain-Controlled Smart Home Environments: Brain Interfaces, Domotics, and Robotics Integration," Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 865-870, 2013.[LINK]