池田 徹志 (Tetsushi IKEDA)
トップページ 経歴 研究内容 研究業績自動運転車いすロボットの研究
-
自動運転の技術を電動車いすにも導入することにより,人との接触や転倒などの事故を防ぎ,安全に活動範囲を広げることが可能になります.しかし,車線のない環境で歩行者や障害物を避けて移動する車いすは,車よりも複雑な経路を進みます.その結果,車いすの挙動が分からないために不安になる問題や,周囲の人も予測が難しい問題が生じます.
振動刺激を用いた自律移動車椅子の搭乗者への経路呈示
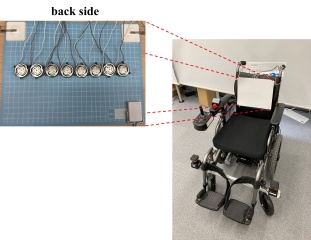
| 自動運転により目的地まで移動する車いすロボットのユーザの不安を解消するため,将来の移動経路をシートに設置した振動刺激により提示します.車いすが歩行者を避けて移動する時に,どちら側にどの程度回避して移動するのかを数秒前に伝える事により,ユーザは車いすの動きを前もって理解することができるため,安心して搭乗することができます. |
 |
動作意図を搭乗者および歩行者と共有する自律パーソナルモビリティ
| 自動運転車いすロボットにプロジェクタを設置し,車いすが将来進む予定の経路を地面に投影する手法を提案しました.障害物を回避する経路を計算した瞬間に,投影された予定経路は形を変えて,車いすのユーザや周囲の歩行者に経路を伝えます. |
 |
Yoichi Morales, Atsushi Watanabe, Florent Ferreri, Jani Even, Tetsushi Ikeda, Kazuhiko Shinozawa, Takahiro Miyashita, Norihiro Hagita, "Including Human Factors for Planning Comfortable Paths," Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 6153 - 6159, 2015. [LINK]
Yoichi Morales, Jani Even, Nagasrikanth Kallakuri, Tetsushi Ikeda, Kazuhiko Shinozawa, Tadahisa Kondo, Norihiro Hagita, "Visibility Analysis for Passenger Vehicle Comfortable Navigation," Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2197-2202, 2014.[LINK]
Atsunori Kanemura, Yoichi Morales, Motoaki Kawanabe, Hiroshi Morioka, Nagasrikanth Kallakuri, Tetsushi Ikeda, Takahiro Miyashita, Norihiro Hagita, and Shin Ishii, "A Waypoint-based Framework in Brain-Controlled Smart Home Environments: Brain Interfaces, Domotics, and Robotics Integration," Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 865-870, 2013.[LINK]